車(chē)牌識(shí)別算法在停車(chē)場(chǎng)極端環(huán)境下的實(shí)際應(yīng)用
目前全國(guó)停車(chē)場(chǎng)建設(shè)情況水平參差不齊,多數(shù)采用露天出入口,光影情況復(fù)雜,更兼以車(chē)輛運(yùn)行形成車(chē)牌大角度等因素,使得車(chē)牌識(shí)別難度加劇,如何提高極端場(chǎng)景下的車(chē)牌識(shí)別率成為業(yè)內(nèi)一直全力攻克的難點(diǎn)。
近年來(lái),私人汽車(chē)擁有量的持續(xù)提升帶動(dòng)了停車(chē)場(chǎng)電子收費(fèi)系統(tǒng)的蓬勃發(fā)展。車(chē)牌識(shí)別作為整個(gè)停車(chē)場(chǎng)電子收費(fèi)系統(tǒng)的計(jì)量基礎(chǔ),日新月異,快速革新。隨著智能車(chē)牌識(shí)別系統(tǒng)逐漸發(fā)展成熟,因其適用更為廣泛、基礎(chǔ)建設(shè)要求更低、成本更為低廉等優(yōu)勢(shì)一步步取代原有的卡介質(zhì)收費(fèi)體系。
但目前全國(guó)停車(chē)場(chǎng)建設(shè)情況水平參差不齊,多數(shù)采用露天出入口,光影情況復(fù)雜,更兼以車(chē)輛運(yùn)行形成車(chē)牌大角度等因素,使得車(chē)牌識(shí)別難度加劇,如何提高極端場(chǎng)景下的車(chē)牌識(shí)別率成為業(yè)內(nèi)一直全力攻克的難點(diǎn)。
為了了解車(chē)牌識(shí)別系統(tǒng)在極端環(huán)境下識(shí)別率發(fā)展現(xiàn)狀,筆者選取了市場(chǎng)上幾家銷(xiāo)量口碑較好的車(chē)牌識(shí)別系統(tǒng),并在大角度情況的應(yīng)用場(chǎng)景下進(jìn)行試驗(yàn)測(cè)試,比較分析不同系統(tǒng)的識(shí)別效果。
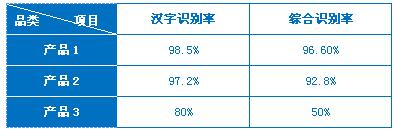
(試驗(yàn)相關(guān)信息:藍(lán)牌,角度45度,樣本量500個(gè),均使用各產(chǎn)品最新版本。)
綜合而較,產(chǎn)品1(火眼臻睛車(chē)牌識(shí)別一體機(jī),以下簡(jiǎn)稱(chēng)“火眼臻睛”)在大角度極端場(chǎng)景下的識(shí)別表現(xiàn)更為出眾。當(dāng)然由此論斷火眼臻睛在各種極端場(chǎng)景下的識(shí)別表現(xiàn)更為優(yōu)秀,或見(jiàn)微知著,或管中窺豹。但是火眼在大角度場(chǎng)景下的優(yōu)勢(shì)不容忽視,眾所周知,現(xiàn)在市面上的車(chē)牌識(shí)別產(chǎn)品大多采用外設(shè)觸發(fā)方式,基于圖像進(jìn)行識(shí)別的技術(shù),對(duì)運(yùn)動(dòng)狀態(tài)或靜止?fàn)顟B(tài)車(chē)輛的車(chē)牌號(hào)碼進(jìn)行非接觸性信息采集并實(shí)時(shí)智能識(shí)別。所以要優(yōu)化車(chē)牌識(shí)別產(chǎn)品在極端環(huán)境下的識(shí)別表現(xiàn),就必須從算法著手進(jìn)行改良。火眼臻睛也不例外,其優(yōu)勢(shì)的產(chǎn)生與其算法研發(fā)的實(shí)力息息相關(guān),那么火眼臻睛算法相較其他廠商優(yōu)于何處?在其他極端場(chǎng)景下的表現(xiàn)如何?
為解答這一疑惑,筆者特意走訪了成都臻識(shí)科技發(fā)展有限公司(以下簡(jiǎn)稱(chēng)“臻識(shí)科技”),對(duì)其在極端環(huán)境下的算法研發(fā)進(jìn)行詳細(xì)了解。獲悉,為增強(qiáng)算法的魯棒性,縮小多環(huán)境和正常環(huán)境下識(shí)別效果的距離,臻識(shí)科技于2016年7月發(fā)布車(chē)牌識(shí)別一體機(jī)2.0版本,并對(duì)其算法做出了更加深入的改進(jìn),在原嵌入式神經(jīng)網(wǎng)絡(luò)算法的基礎(chǔ)上對(duì)各極端場(chǎng)景車(chē)牌識(shí)別進(jìn)行了優(yōu)化提升。
對(duì)于多環(huán)境而言最大的差異是由于自然光變化而引起的車(chē)牌識(shí)別成像效果變差,而不同場(chǎng)景下成像效果的影響因素各不相同:
(1)雨霧天氣能見(jiàn)度較低,獲取的車(chē)牌圖片質(zhì)量會(huì)有嚴(yán)重的退化,因此車(chē)牌識(shí)別系統(tǒng)必須實(shí)現(xiàn)圖像復(fù)原功能,即采用圖像復(fù)原算法對(duì)雨霧天退化圖像實(shí)現(xiàn)場(chǎng)景的再現(xiàn)。
(2)夜間在大燈的作用下,車(chē)牌的圖像可能會(huì)變得一團(tuán)黑一團(tuán)白的情況,解決這個(gè)問(wèn)題通常會(huì)用到以算法控制補(bǔ)光燈的智能補(bǔ)光技術(shù),同時(shí)采用雙重寬動(dòng)態(tài),使其車(chē)牌識(shí)別攝像機(jī)能夠在同一畫(huà)面捕捉到更多的亮面和暗部的細(xì)節(jié),更接近于人眼睛看到的事物。
(3)對(duì)于順逆光而言,可以通過(guò)局部曝光、強(qiáng)光抑制等智能控光技術(shù)調(diào)整攝像機(jī)的曝光參數(shù)從而實(shí)現(xiàn)優(yōu)異的成像自動(dòng)控制。
(4)對(duì)于因車(chē)輛運(yùn)行而形成的大角度,個(gè)別廠家的車(chē)牌識(shí)別系統(tǒng)對(duì)于此種情況的處理效果并不理想,該問(wèn)題在有轉(zhuǎn)彎和出入口較寬的停車(chē)場(chǎng)顯得尤為明顯,當(dāng)然通過(guò)對(duì)車(chē)牌識(shí)別攝像機(jī)的高度和角度的控制,可以減少大角度的弧度,但是并不能完全解決這個(gè)問(wèn)題,還得加上算法識(shí)別,火眼臻睛車(chē)牌識(shí)別算法增加對(duì)變形字符的識(shí)別處理,專(zhuān)門(mén)針對(duì)這個(gè)問(wèn)題做特別處理,再加上局部曝光功能,在識(shí)別大角度下的車(chē)牌效果更好。
每一項(xiàng)的算法改進(jìn),都凝聚了多點(diǎn)的算法創(chuàng)新和突破。正如臻識(shí)科技算法工程師所說(shuō),“在算法研發(fā)的過(guò)程中,每一項(xiàng)改進(jìn)都是困難的,因?yàn)橥及殡S著其它新問(wèn)題的產(chǎn)生。以提高逆光情況下的靈敏度為例,如果其對(duì)逆光環(huán)境識(shí)別是有益的,那么就要考慮在正常情況下,把非車(chē)牌當(dāng)成車(chē)牌來(lái)識(shí)別的概率會(huì)提高、識(shí)別速度變慢等問(wèn)題。”但是即使困難重重也不應(yīng)該就此止步,對(duì)產(chǎn)品算法性能極致追求的信念應(yīng)該為整個(gè)行業(yè)所堅(jiān)持。
極端場(chǎng)景下算法的優(yōu)化,極大提高了車(chē)牌識(shí)別在多環(huán)境、多角度下的識(shí)別率和適用性。一個(gè)行業(yè)的成熟進(jìn)步,離不開(kāi)從業(yè)者每一次嘗試、努力、突破。世之奇觀,在于險(xiǎn)遠(yuǎn);人所罕至,有志而達(dá)。正確的方向和持續(xù)的努力,才能讓一個(gè)企業(yè)在這個(gè)新興行業(yè)里砥礪奮進(jìn),占得一席之地。